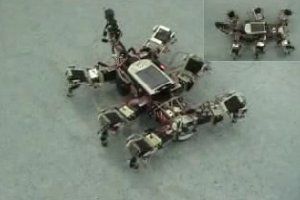
Forscher in Göttingen haben einen sechsbeinigen Laufroboter entwickelt, der sehr flexibel verschiedene Gangarten nutzen und damit situationsabhängig optimale Bewegungsabläufe lernen kann. Dazu nutzt der Roboter nur ein einziges kleines Verschaltungsnetzwerk, das mittels eines Mechanismus zur "Chaos-Kontrolle" verschiedene Bewegungsmuster erzeugen kann.
"Ein Schwerpunkt unsere Forschung war, wie Roboter autonom möglichst vielseitig reagieren können", erklärt Marc Timme, Leiter der Network Dynamics Group am Max-Planck-Institut für Dynamik und Selbstorganisation , im Gespräch mit pressetext. Die Grundlagenarbeit könnte langfristig für vielseitige Anwendungen von Marsrobotern bis zur Orthesensteuerung interessant sein.
Wenig Hardware macht flexibel
Periodische Bewegungen wie der Gang werden bei Lebewesen von kleinen neuronalen Einheiten gesteuert, den zentralen Mustererzeugern (central pattern generators, CPG). Dieses Prinzip kommt auch bei Laufrobotern zur Anwendung, wobei bislang für verschiedene Gangarten mehrere CPGs zum Einsatz kamen. Der Göttinger Roboter kommt mit weniger Hardware aus. Er nutzt nur einen Mustererzeuger, der zunächst ein chaotisches Muster produziert. Dieses kann kontrolliert in verschiedene periodische Muster und somit Gangarten übergeführt werden- daher der Begriff Chaos-Kontrolle.
Wie sich der sechsbeinige Roboter fortbewegt, ist von den Daten integrierter Sensoren abhängig. So wird je nach Situation eine geeignete Gangart gewählt und der Roboter kann auch lernen, seine Wahl zu optimieren. Beispielsweise ermöglicht es ein Stromsensor, dass der Roboter beim Bewältigen einer Steigung sein Bewegungsmuster so lange ändert, bis er einen möglichst geringen Energieaufwand erreicht. Die erlernte Gangart kann er dann für vergleichbare Steigungen wieder abrufen.
Vielseitiges Anwendungspotenzial
Timme zufolge ist ein einzelner zentraler Mustererzeuger leichter zu implementieren, vor allem, wenn ein Roboter eine größere Anzahl von Gangarten beherrschen soll. Gleichzeitig werde mit nur einem CPG das Lernen von Bewegungsabläufen einfacher. "Wenn ein Roboter in schwierigem Gelände hängt, könnte ihm theoretisch mit der Übertragung einer neuen Periode für den Mustergenerator auch eine neue Gangart zur Befreiung übermittelt werden", sagt der Wissenschaftler. Das ist bei Robotern mit einem eigenen CPG für jedes Bewegungsmuster unmöglich.
Die gemeinsame Arbeit mit dem Bernstein Zentrum für Computational Neuroscience und der Georg-August Universität Göttingen ist bislang Grundlagenforschung, wie der Wissenschaftler betont. Langfristig könnte das Prinzip beispielsweise für Mars- oder Bergeroboter interessant sein, die sich in unwegsamem Gelände optimal bewegen sollen. Doch auch in der Medizin könnte die Idee Anwendung finden. "Es gibt ein Projekt zur Orthesensteuerung", so Timme. Auch für Prothesen, die aufgrund von Nervenimpulsen unterschiedliche Bewegungen vollführen sollen, könne das Prinzip theoretisch geeignet sein. (pte)