
Man könnte ihn mit einem schlafenden Flamingo vergleichen: Der zweibeinige Roboter, der von einem deutsch-schweizerischen Forschungsteam entwickelt wurde, kann durch automatisches Ausbalancieren Energie aufrecht stehen, ohne viel zusätzliche Energie dafür zu benötigen. Tatsächlich nahm sich das Team um Alexander Badri-Spröwitz vom Max-Planck-Institut für Intelligente Systeme (MPI-IS) in Stuttgart mit Beteiligung der ETH Zürich Laufvögel zum Vorbild. Ihre Arbeit veröffentlichte die Forschungsgruppe am Mittwoch im Fachmagazin "Science Robotics".
Derzeit gelingt es keinem Roboter, schnell in natürlicher Umgebung über lange Strecken zu laufen. Für viele Tiere ist dies jedoch Alltag. Beispielsweise rennen Emus, die bis zu 45 Kilogramm wiegen, mit einer Maximalgeschwindigkeit von 50 Stundenkilometern durch die Landschaft. Die Forschenden untersuchten nun detailliert, wie die Muskeln und Sehnen von Emus Energie zwischen Bein- und Hüftgelenken übertragen. Dieses Modell nutzten sie, um die mit Gelenken und Sprungfedern ausgestatteten Roboterbeine zu konzipieren.
Jedes BirdBot-Bein verfügt demnach über einen Feder-Sehnen-Mechanismus, der das Fußgelenk mechanisch mit den übrigen Gelenken verbindet. Verbaut sind lediglich zwei Motoren – der eine im Hüft-, der andere im Kniegelenk. Diese helfen, das Bein vor- und zurückzuschwingen und die Kniebeugung zu steuern. "Das Ein- und Auskuppeln der Beinfedern überlassen wir der von Vögeln inspirierten Mechanik. Das ist robust, schnell und energieeffizient", sagte Badri-Spröwitz laut einer Mitteilung des MPI-IS.
Vorteile auf unvorhersehbarem Terrain
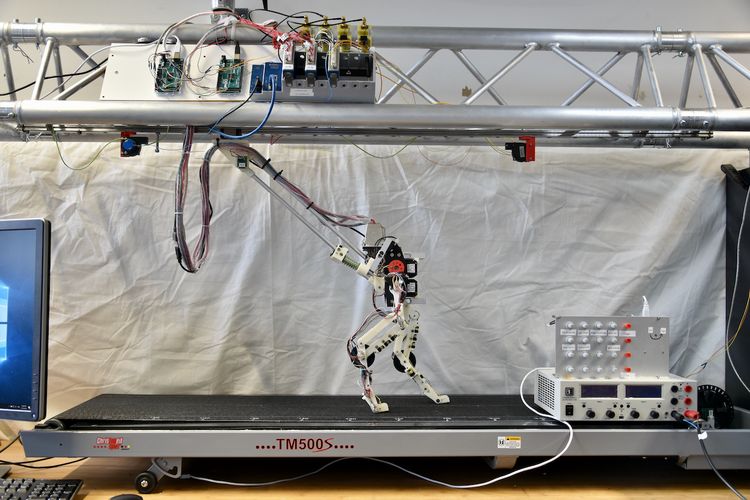
Dass das Konzept funktioniert, zeigten die Forschenden, indem sie BirdBot auf einem kleinen Laufband laufen ließen. Wie sein natürliches Vorbild streckt der Roboter seine Füße, bevor diese den Boden berühren. Dann stößt er sich ab und klappt in der Schwungphase die Füße nach hinten um.
Ein klarer Vorteil von BirdBot sei, dass er aufrecht stehen könne, auch wenn alle Motoren ausgeschaltet seien, schreibt die Forschungsgruppe. Laut den Forschenden ermöglicht der neue Mechanismus eine schnelle mechanische Kontrolle beim Übergang von Schwung zu Stand. Das könne besonders bei der Fortbewegung auf unebenem, unvorhersehbarem oder weichem Terrain von Vorteil sein. (APA, red, 17.3.2022)