Bei Menschen dauert es in der Regel ein Jahr, bis viele Babys ihre ersten Schritte machen – auch bedingt durch die Komplexitäten des zweibeinigen Ganges. Bei Vierbeinern geht es schneller. Sie meistern grundlegende Fortbewegung in der Regel meist innerhalb von einigen Stunden bis Wochen.
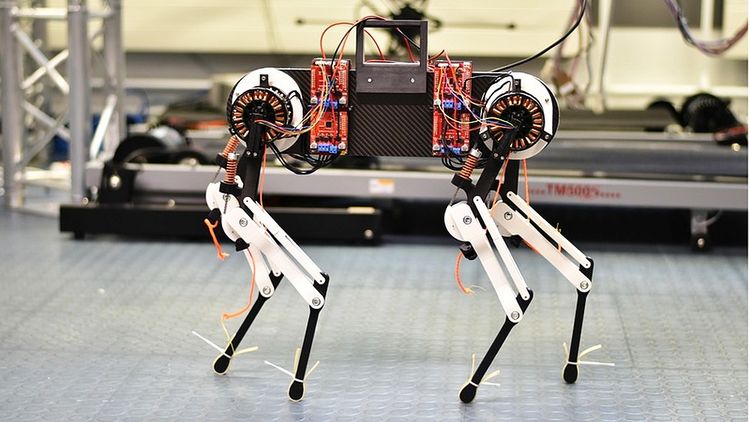
Diesen Lernprozess wollten Forscher am Max-Planck-Institut für intelligente Systeme nun nachbilden, um ihn besser zu verstehen. Dafür haben sie einen etwa Labrador-großen Roboterhund namens "Morti" gebaut. Mithilfe einer künstlichen Intelligenz musste sich dieser selbst das Gehen beibringen – mit beachtlichem Erfolg.
Zum Einsatz kam ein digitales neuronales Netzwerk in Verbund mit einem Optimierungsalgorithmus und dem Software-Modell eines Rückenmarks, das natürliche Reflexe nachbilden soll. Das System ist darauf ausgelegt, den Roboter über die Koordination der Sensordaten aus den Füßen und der Steuerung der Motoren und Hydraulik unter Beachtung besagter Reflexe zu stabilisieren und zu bewegen.
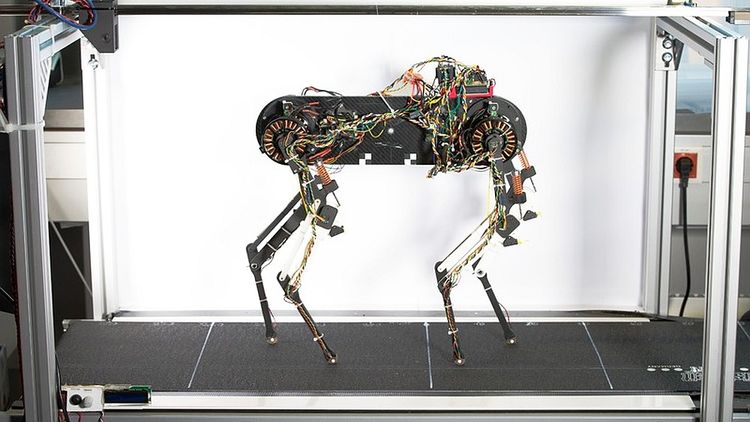
Dabei soll das System aus eigenen Fehlern lernen, etwa wenn Morti bei mehreren Anläufen immer wieder ins Stolpern gerät. Mittels Mustererzeugung – einer grundlegenden Funktion menschlicher und tierischer Hirne – versucht es dabei, eine gleichmäßige Bewegungsabfolge zu erlernen, die die vorgegeben Ziele von Stabilität und Bewegung erfüllt. Und das gelang, binnen einer Stunde konnte der Maschinenhund stabil gehen.
Das System verfügte zu Beginn über kein explizites Wissen über die Funktionsweise oder Anatomie seiner Beine, sondern eben nur über ein Reflexsystem, wie es auch bei Tieren schon ab der Geburt dank Nervenknoten im Rückenmark existiert. Die effektive Koordinierung seiner Gliedmaßen und die Herstellung von Gleichgewicht in Bewegung musste sich der Roboter erst antrainieren.
Beachtenswert ist auch, dass die Leistungsaufnahme des Prozessors bei Mortis Gehvorgang gerade einmal fünf Watt beträgt. Industriell hergestellte vierbeinige Roboter, die sich stark auf komplexe Steuerhardware stützen, die über genaue Informationen über die Anatomie der Maschine verfügt, verbrauchen wesentlich mehr. Sie kommen auf Werte im zweistelligen Bereich bis hin zu mehreren Hundert Watt.
Da es kaum machbar ist, das Rückenmark eines lebenden Tieres bei solchen Lernprozessen zu untersuchen, soll der Roboterhund einspringen. Die Mustererzeugung und Reflexe in Kombination mit dem virtuellen Rückenmark in einem Roboter soll es ermöglichen, Fragen nachzugehen, die die Biologie alleine nicht beantworten kann.
Die Forscher haben ein Paper zu ihrem Projekt im "Journal Nature Machine Intelligence" veröffentlicht. (gpi, 21.7.22)