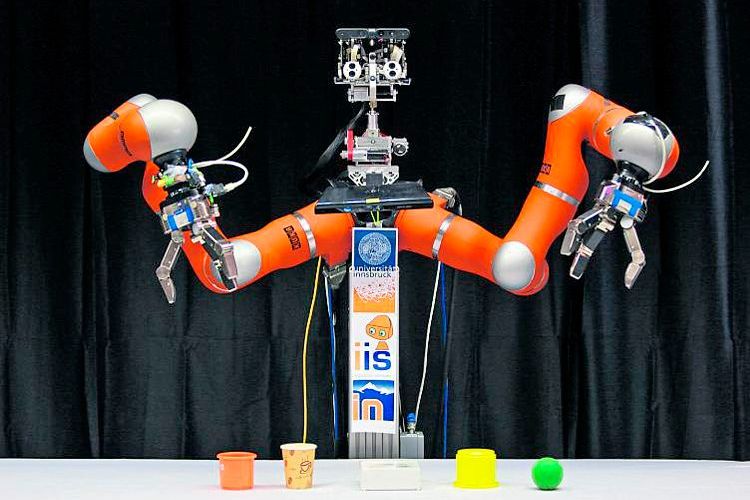
Wie stapelt man diese fünf Gegenstände, um einen möglichst hohen Turm zu bauen? Dem Innsbrucker Roboter Robin fällt diese Aufgabe leicht, weil er es durch Erkunden der Gegenstände und einige missglückte Stapelversuche von Grund auf gelernt hat.
Innsbruck – Langsam senkt sich die Roboterhand über den Pappkaffeebecher. Sie ergreift ihn und führt ihn bedächtig hin zu dem Turm aus einer Kartonbox und zwei Plastikschalen, die der Roboter mit seinen langen orangen Armen bereits aufeinandergestapelt hat. Schließlich kommt noch ein grüner Gummiball dazu, den die klobigen Metallfinger zielsicher im Becher an der Spitze des Turms versenken.
Vor dem Roboter sitzt Emre Ugur und überwacht seine Aktionen auf einem Computer. Dem Bildschirm ist eine Sequenz an Aktionen abzulesen, die Robin – so heißt der Roboter aus Innsbruck – in den Augenblicken vor dem Turmbau selbstständig geplant hat. Und auch wenn der Becher etwas schief zu stehen kommt, vollendet Robin sein Werk problemlos.
Emre Ugur, der mittlerweile an die Bogziçi-Universität in Istanbul wechselte, hat Robins Lernfähigkeiten in den vergangenen Jahren gemeinsam mit Justus Piater am Institut für Informatik der Universität Innsbruck entwickelt. Robin entstand im Rahmen des EU-Projekts "Xperience", das darauf abzielt, Roboter zu schaffen, die ihr Wissen nicht durch eine fixe Programmierung, sondern durch Lernen aus Erfahrung, aus der Interaktion mit ihrer Umwelt beziehen. Und das macht Robin auch: Er hat gelernt, Türme aus beliebigen Gegenständen zu bauen, die er vor sich hat – einfach indem er sie erkundet und ihr Verhalten erprobt.
Robins Lernprozess ist in drei Schritten aufgebaut, erklärt Piater. "Im ersten Schritt tippt er einzelne Gegenstände wiederholt von verschiedenen Seiten an. Dabei beobachtet er, wie sich der Gegenstand verhält." Dem Roboter stehen für seine Wahrnehmung eine Kinect-Tiefenkamera und Kraftsensoren zur Verfügung. Bei seinen Antippversuchen lernt er verschiedene Kategorien zu unterscheiden, zum Beispiel Gegenstände, die wegrollen, oder andere, die sich durch seinen Finger verschieben lassen.
Regeln ableiten und planen
Nachdem er die Gegenstände für sich charakterisiert hat, probiert Robin in einem zweiten Schritt aus, wie er sie stapeln kann. "Dieses Lernproblem ist viel schwieriger als das erste, da nun zwei Gegenstände gleichzeitig im Spiel sind", erläutert der Informatiker. Eine Erkenntnis der beiden Forscher ist, dass Robin das Problem viel besser in den Griff bekommt, wenn er nicht nur optische Sensordaten, sondern auch die im ersten Schritt gelernte Kategorisierung für die Vorhersage der Stapelbarkeit verwendet.
Robin leitet Regeln ab, wie Objekte beschaffen sein müssen, damit sie zueinanderpassen. Diese Pläne werden im dritten Schritt für die Planung von Türmen verwendet. Man kann Robin beauftragen, einen möglichst hohen oder einen möglichst kompakten Turm zu bauen. Je nachdem reiht er die vorhandenen Objekte dann übereinander oder schlichtet sie ineinander. Nicht stapelbare Gegenstände lässt er aus.
Robin lernt ähnlich einem Kleinkind Zusammenhänge assoziativ aus Erfahrung. Er hat keine geometrischen oder physikalischen Gleichungssysteme als Grundlage für seine Entscheidungen. "Der Roboter hat keinen Begriff von Wegrollen, sondern nur Signaturen im 3-D-Raum, die er zu Mustern zusammenfasst", erklärt Piater. Sogenannte Cluster-Algorithmen befähigen ihn, unterschiedliches Verhalten zu erkennen. Er schafft Kategorien, denen er dann nur aufgrund optischer Informationen – ohne dass er es jedes Mal selbst ausprobiert – ein Verhalten zuordnen kann.
Zusammenhänge, die er einmal hergestellt hat, befähigen ihn, aufbauende, komplexere Konzepte zu erlernen. Sobald er weiß, dass ballförmige Dinge wegrollen, ist es einfacher für ihn, in einem nächsten Schritt zu lernen, dass er Bälle nicht auf die Kartonbox stapeln, sehr wohl aber im Kaffeebecher versenken kann.
Roboter für den Haushalt
Die Frage ist nun, welches Niveau derartige Lernprinzipien erreichen können. Piater und Ugur können sich etwa Haushaltsroboter vorstellen, die einen Großteil des Wissens über Tätigkeiten in der Küche mitbringen, aber vor Ort dann einen Lernprozess zu den jeweiligen konkreten Gegebenheiten durchmachen. "Der Roboter weiß, dass man Teller stapeln kann, aber noch nicht, wo sie im Haus zu finden sind", so Piater. Für ihn ist die Lernfähigkeit mithilfe symbolischer Fakten und Regeln, die Robin vorzeigt, der praktikabelste Weg, um Roboter schwierige Aufgaben meistern zu lassen. "Nimmt man allein die Sensordaten als Grundlage für das Verhalten, ist die Komplexität stark begrenzt. Man kann auch nicht alle Fähigkeiten von Hand einprogrammieren", sagt der Wissenschafter.
Robins Zukunft soll einen Ausbau des Konzepts bringen. Er könnte lernen, Objekte nicht nur zu versetzen, sondern sie auch wenden zu können. Er könnte ein physikalisches Grundverständnis eingepflanzt bekommen. Und er könnte lernen, verschiedene Werkzeuge für seine Arbeiten einzusetzen. (Alois Pumhösel, 1.5.2016)